位置情報収集
高精度・広範囲の屋内位置測位を実現する「picalico」
位置測位の元となるデータは、カメラのピクセル情報なので、高精度な位置測位を実現することができます。 カメラにLED送信機の色変化パターンが映れば受信可能なため、広範囲に測位ができます。

- ※
- 位置検知エリアが50m四方で、10cm×φ10cmの送信機をHD解像度 カメラ、90度画角レンズを使用して測位した場合
利用シーン
工場や倉庫など屋内の位置測位に利用します。


測位方式概要
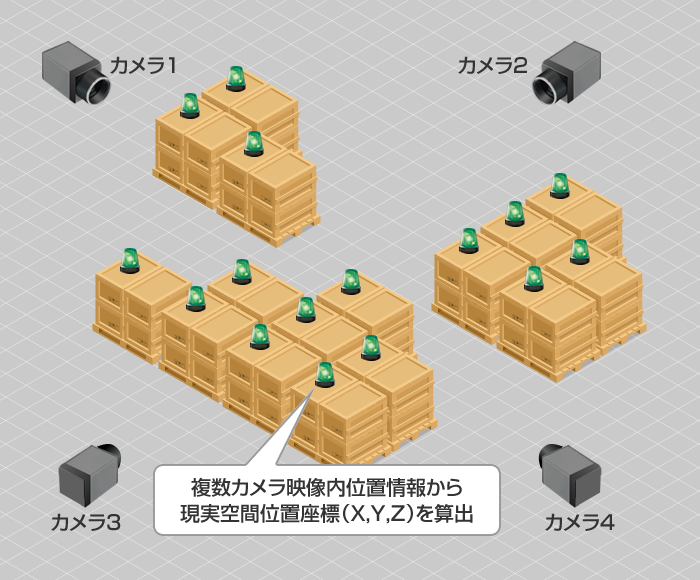
マルチカメラ測位

複数台のカメラ画像から、三角測量方式でLED送信機の3次元位置を測量します。
シングルカメラ測位
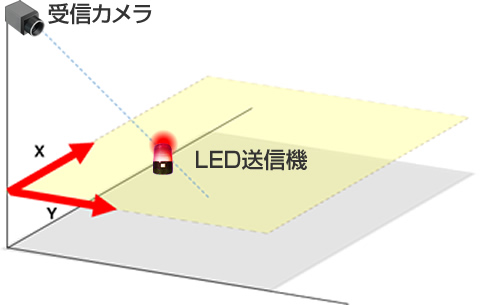
1台のカメラ画像から、射影変換方式でLED送信機の2次元位置を測量します。
システム構成

LED送信機
カシオ製LED送信機 PM01

| 項目 | 仕様・内容 |
|---|---|
| 送信ID | 固定 |
| 信号切替 | USB端子からID指定 |
| 電源 | 単1電池、USB給電 |
| 寸法 | 直径113mm×高さ158mm |
パトライト社製積層表示灯 LA6

パターン登録機能を使って、ピカリコ送信機として使用できます。
| 項目 | 仕様・内容 |
|---|---|
| 送信ID | 15パターン登録可能 |
| 信号切替 | 4本の接点入力 接点信号で切替 |
| 電源 | DC24/AC100~240 |
| 寸法 | 直径60mm×高さ290mm |
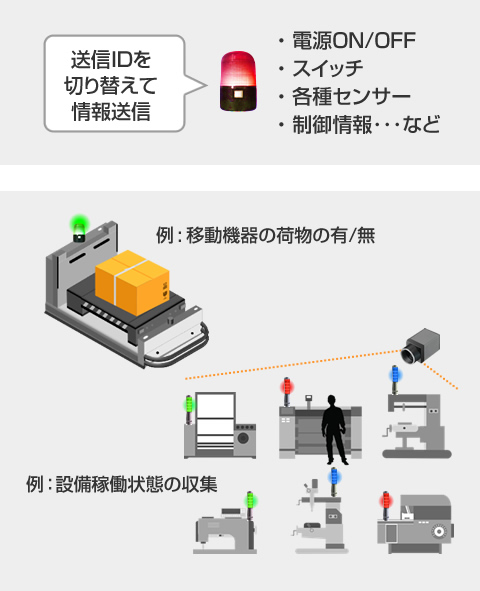
送信機の色変化パターンを切り替えて状態情報を送信
移動機器、設備の状態に応じて送信ID番号を切り替え、状態情報を収集します。
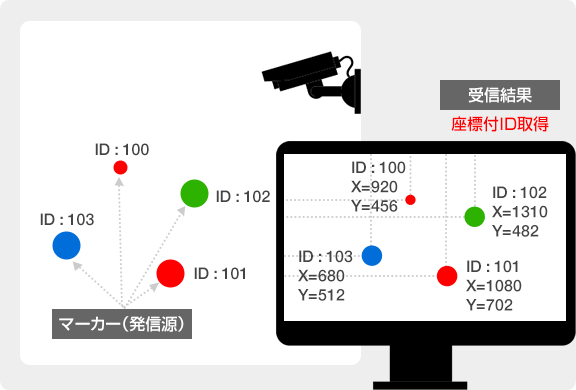
カメラ画角内の位置を把握する
- 受信情報はID番号(106万通りの数値)と発信位置のカメラ画像内座標(ピクセル単位)です。
- カメラ画像内での各情報(ID)の発信位置が簡単にわかります。
- 電波等の手段ではむずかしい対象物の相対位置把握が、近距離から遠距離まで、簡単にできます。
- カメラ画像上の発信位置に重ね合わせて受信データを表示するなどの視覚的表現が容易にできます。
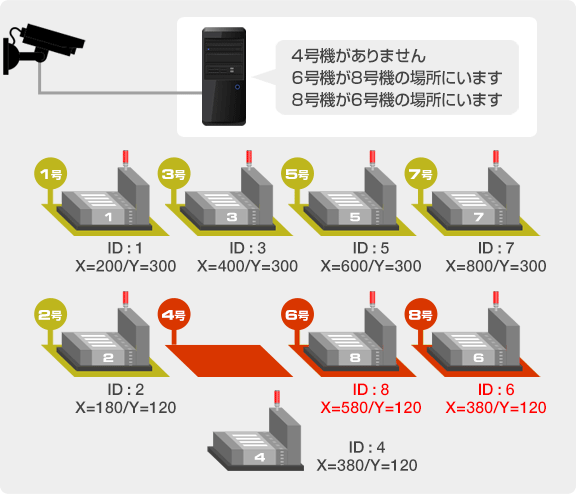
利用例① 物が所定の場所にあるかを知る
利用例② グループ分け状態の検知

実空間の位置情報を把握
Picalico用アプリケーション「Picalicoポジション」を使って、複数のPicalico受信情報から、現場での実際の位置座標を算出します。

- ※
- カメラ設置後、一度の位置キャリブレーション作業が必要です。
- ※
- 対象物が写るカメラの台数によって位置精度が変わります。
想定用途例
- ・
- 仮置き場所の物品管理や現在位置探し
- ・
- カゴ台車や自動搬送機などの位置把握
- ・
- その他、移動する什器等の現在位置探し